
科研成果 | 张锦绣教授、刘源副教授团队在领域顶刊Defence Technology发表论文
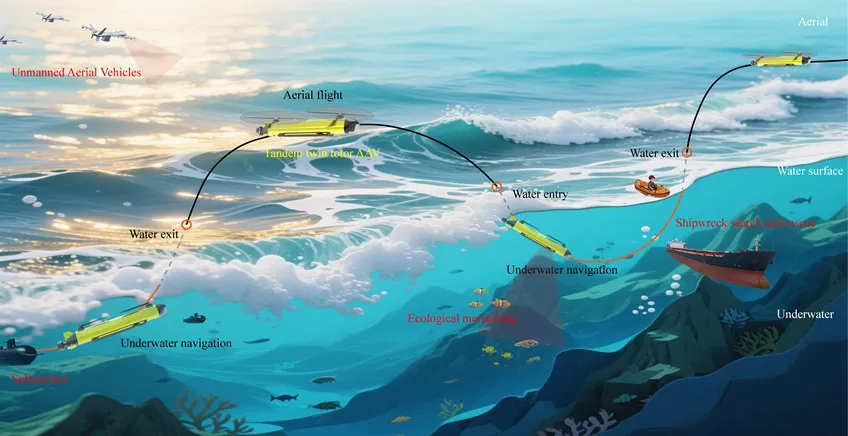
水空跨介质无人机(Aerial-Aquatic Vehicles, AAVs)作为新一代智能无人系统,在海洋监测、环境勘探和水上救援等民用领域展现出巨大的应用潜力。与此同时,随着现代海战向多维空间拓展,这类飞行器在军事侦察和登岛突防等任务中的应用价值也日益凸显。AAVs在空中、水面和水下跨域空间应用的可行性已初步得到验证,但其实际性能仍面临诸多挑战。特别是在复杂海洋环境中,AAVs易受海浪、风和洋流等动态外部因素的干扰,导致其机动性和稳定性难以满足实际应用需求。因此,实现AAVs在空海立体环境中连续高机动跨域稳定控制,将显著提升其在实际应用中的可靠性和实用性。
针对这一问题,中山大学张锦绣教授、刘源副教授团队以“Nonsingular terminal super-twisting sliding mode control with extended state observer for multi-domain motion control of tandemtwin-rotor Aerial-aquatic vehicles”为题,在我国领域顶刊《Defence Technology》(中科院一区,top, IF = 5.9)上发表论文。2022级博士生伍思繁为第一作者,中山大学张锦绣教授、刘源副教授为共同通讯作者。该跨介质无人机(飞鲨1号)曾获全国海洋航行器设计与制作大赛一等奖。此外,该研究得到了国家自然科学基金、广东省重点领域研发计划“海洋科技”重大专项旗舰项目、广东省特支项目以及南方海洋科学与工程广东省实验室(珠海)的资助。
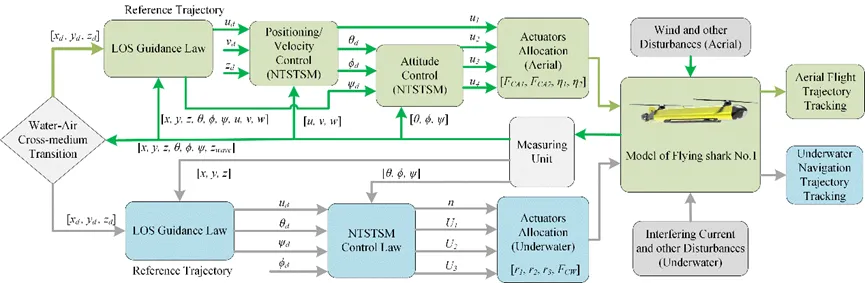
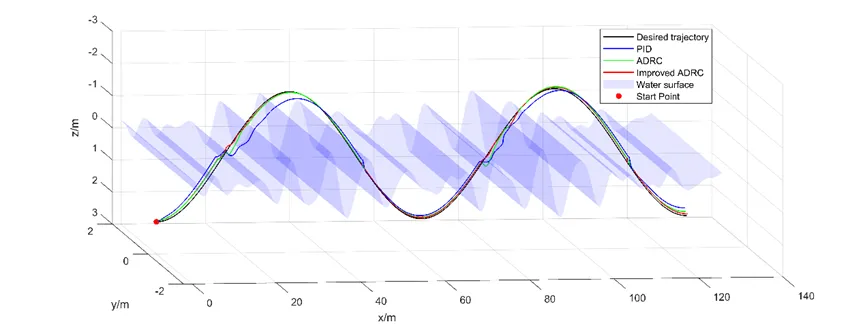
研究团队提出了一种带扩张状态观测器(ESO)的非奇异终端超螺旋滑模(NTSTSM)控制方法和跨域切换规则以应对复杂的环境扰动和满足跨介质无人机在多域场景下的不同任务需求。该研究利用LOS制导率,并结合NTSTSM控制方法实现了连续跨域轨迹的可靠跟踪。通过与PID和ADRC控制方法的仿真对比,所提出的控制方法显著提高了跨介质无人机在风、浪和洋流等复杂海域环境下的控制精度、响应速度和鲁棒性。
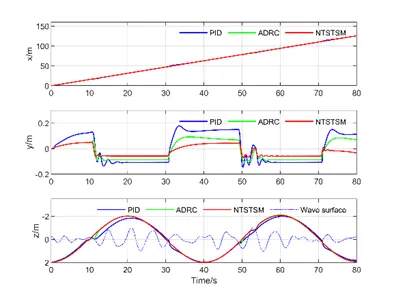
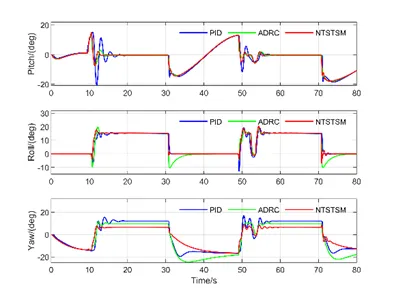
(a)连续跨介质轨迹跟踪中的位置变化 (b)连续跨介质轨迹跟踪中的姿态变化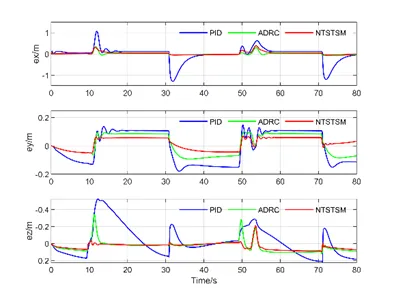
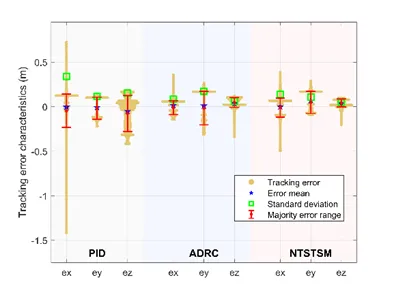
(c)连续跨介质轨迹跟踪中的位置误差 (d)不同控制方式下三轴方向的跟踪误差统计
图4. 纵列双旋翼跨介质无人机连续跨域轨迹跟踪的性能参数对比
该成果提升了跨介质无人机的环境适应性与任务可靠性,为跨介质无人机在复杂海况下的高机动飞行与稳定控制奠定了坚实的理论基础。对其在海洋监测、应急救援、防务等领域的实际应用具有重要的指导作用。
通讯作者

张锦绣教授,中山大学航空航天学院副院长/博导、科技部重点研发计划项目首席科学家、广东省特支计划科技创新领军人才、我国首个编队干涉SAR卫星系统“天绘二号”卫星副总设计师、全球高校首颗月球探测微卫星“龙江二号”卫星总设计师、空间引力波探测实验卫星“天琴一号”地面系统副总指挥。研究领域主要包括深空探测航天器系统复杂动力学与智能控制理论、跨介质智能两栖无人机及其集群协同机理、智能微小型航天器系统设计及集群空间博弈。

刘源副教授,中山大学航空航天学院副教授。曾历任多个导弹和卫星型号副主任/主任设计师/副总设计师。先后承担与参与863、973、高分专项、军科委创新特区、国防预研项目等十余项,在小卫星的综合电子系统、任务规划等技术方面积累了较为丰富的知识和经验。发表学术论文20余篇,申请并授权专利近十项,获国防科技进步一等奖一项。
第一作者

伍思繁,中山大学航空航天学院2022级博士研究生,研究方向为空海跨介质无人机动力学与运动控制。曾获中国国际大学生创新大赛全国银奖、全国海洋航行器设计与制作大赛一等奖、中国研究生未来飞行器创新大赛一等奖等多个奖项。读博期间以第一作者身份发表中科院一区论文3篇(共同一作1篇),中科院三区论文1篇,申请发明专利4项。
1、引用格式
Wu S, He Z, Wang L, et al. Nonsingular terminal super-twisting sliding mode control with extended state observer for multi-domain motion control of tandem twin-rotor Aerial-aquatic vehicles[J]. Defence Technology, 2025.
2、文章链接
https://authors.elsevier.com/c/1ls809CxAHH~mJ
供稿 | 伍思繁
排版 | 敖欣茹
初审 | 刘源 张怀钦
审核 | 张锦绣 赵晓江
审定发布 | 罗愈业


