
科研成果 | 飞行器动力学与控制团队在空间机器人轨迹规划方法研究取得进展
PART1 研究背景与问题挑战
随着航天任务的不断发展,我国对大型空间望远镜、太阳能电池阵列等超大尺度航天结构的在轨组装需求日益迫切。由于此类结构体积与重量巨大,传统的“一次发射、在轨展开”技术已难以满足需求,以空间机器人为核心的“多次发射、在轨装配”模式逐渐成为超大型航天结构建造的重要方向。其中,自由漂浮空间机器人能够在失重环境下完成构件搬运、对准和对接等高精度操作,被视为未来空间在轨组装的关键装备。然而,为保证系统稳定性和结构安全,自由漂浮空间机器人输出力矩受限,装配速度受限、效率较低;若盲目提高运动速度,则导致关节力矩峰值过大,引发姿态偏差、结构振荡甚至装配失稳。现有研究依赖复杂的全局优化算法进行自由漂浮空间机器人的轨迹规划,计算代价高、收敛速度慢,难以满足在轨装配对高效率与高精度的双重要求。因此,如何在力矩受限条件下实现快速、精准且鲁棒的轨迹规划,成为当前空间机器人在轨组装研究的核心问题。
PART2 研究内容
针对自由漂浮空间机器人在轨装配过程中存在的强耦合与规划慢等问题,中山大学研究团队提出了一种面向双臂空间机器人的惯量自适应轨迹规划方法,构建了时间最优性的双臂协同规划框架。该方法根据目标模块的质量比与惯量比,自适应分配双臂在平移与旋转任务中的协作比例;采用五次多项式插值生成平滑关节轨迹,结合耦合动力学模型计算各关节力矩,利用关节力矩与执行时间的幂律衰减关系动态调整轨迹执行时长,达到了在满足力矩限幅条件下实现最短可行执行周期的目标。该方法通过组装任务自适应分配显著提升规划与执行效率,为自由漂浮空间机器人在轨快速组装提供了高效的解决方案。日前,该研究成果以“Inertia-adaptive trajectory planning of a dual-arm space robot for rapid in-space assembly”为题,发表在国际宇航科学院(IAA)主办的航空航天领域权威期刊《Acta Astronautica》上,中山大学航空航天学院博士生王塬欣为论文第一作者,参与人包括中山大学航空航天学院刘家夫副教授,硕士生马树杰等。中国航天科技体系与创新研究院李媛媛高工,中山大学航空航天学院蒋建平教授、王兴副教授为共同通讯作者。研究得到了深圳市优秀科技创新人才培养“优青”项目和国家自然科学基金等项目的资助。
PART3 研究结论
研究团队通过数值仿真与地面实验对所提出的惯量自适应轨迹规划方法进行了全面验证。仿真对象为一个由两个六自由度工业机械臂、一个自由漂浮基座以及两个目标模块组成的自由漂浮空间机器人–目标模块系统,建立了如图 1 所示的动力学仿真模型。计算结果表明,与传统粒子群优化(PSO)算法相比,所提方法的规划时间缩短超过两个数量级(从数百秒降至数秒级),显著提升了计算效率;轨迹执行所需时间缩短约 30%–35%,轨迹更为平滑、动作协调性更强。在此基础上,研究了固定扰动(如图2所示)与随机扰动下惯量自适应轨迹规划方法的稳定性与执行性能,并采用蒙特卡洛随机试验进行验证。结果显示,在±10% 质量与惯量扰动下,轨迹规划时间与执行时间均保持稳定,最大末端误差在毫米范围内,所有关节力矩均未出现饱和现象,表明该方法在复杂不确定性条件下仍具有良好的鲁棒性与可行性。
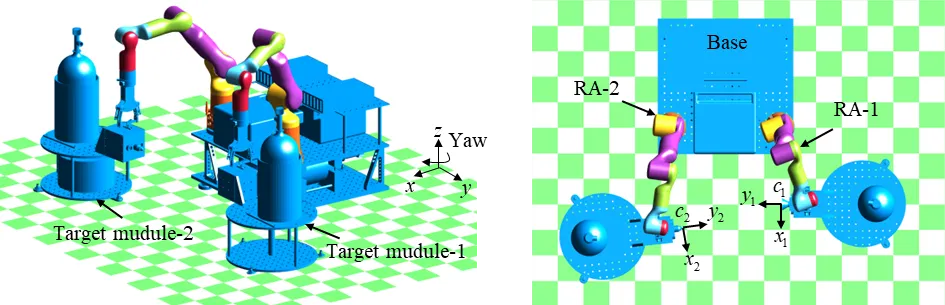
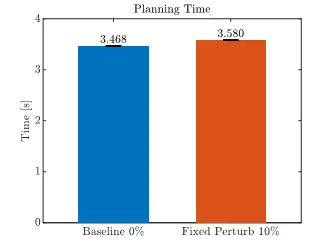
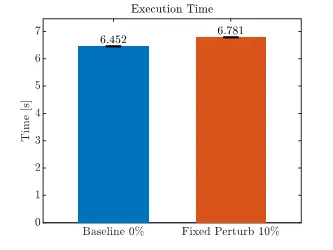
图2 固定扰动下惯量自适应轨迹规划的规划时间和执行时间
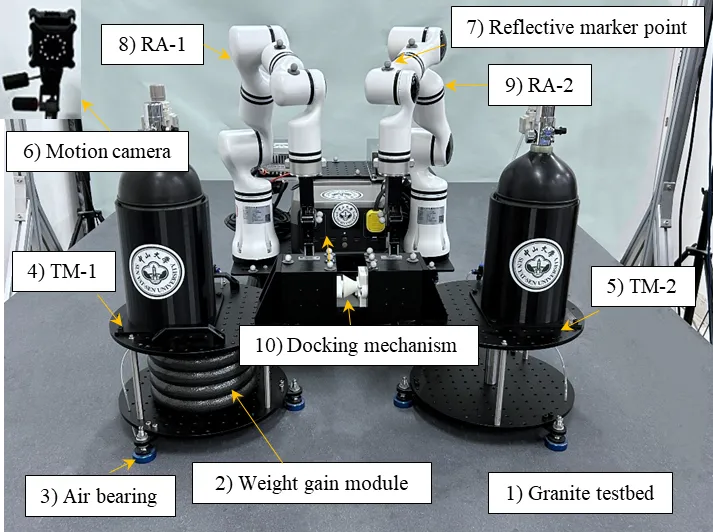
进一步地,研究团队搭建了面向复杂在轨组装操作任务研究的空间近距操作实验装置(Space Proximity Operations Testbed, SPOT)。如图 3 所示,该装置由双机械臂系统、自由漂浮气浮支撑平台、目标模块(质量分别为10.98 kg 和 30.98 kg)以及高精度动捕测量系统组成。其中,双机械臂系统安装在自由漂浮基座上,可实现六自由度协同操作;气浮平台通过气膜支撑实现近似无摩擦的平面漂浮运动,用以模拟空间环境中的自由漂浮动力学特性;动捕测量系统(Motion Capture System)则对基座与机械臂的空间位姿进行实时高精度测量。
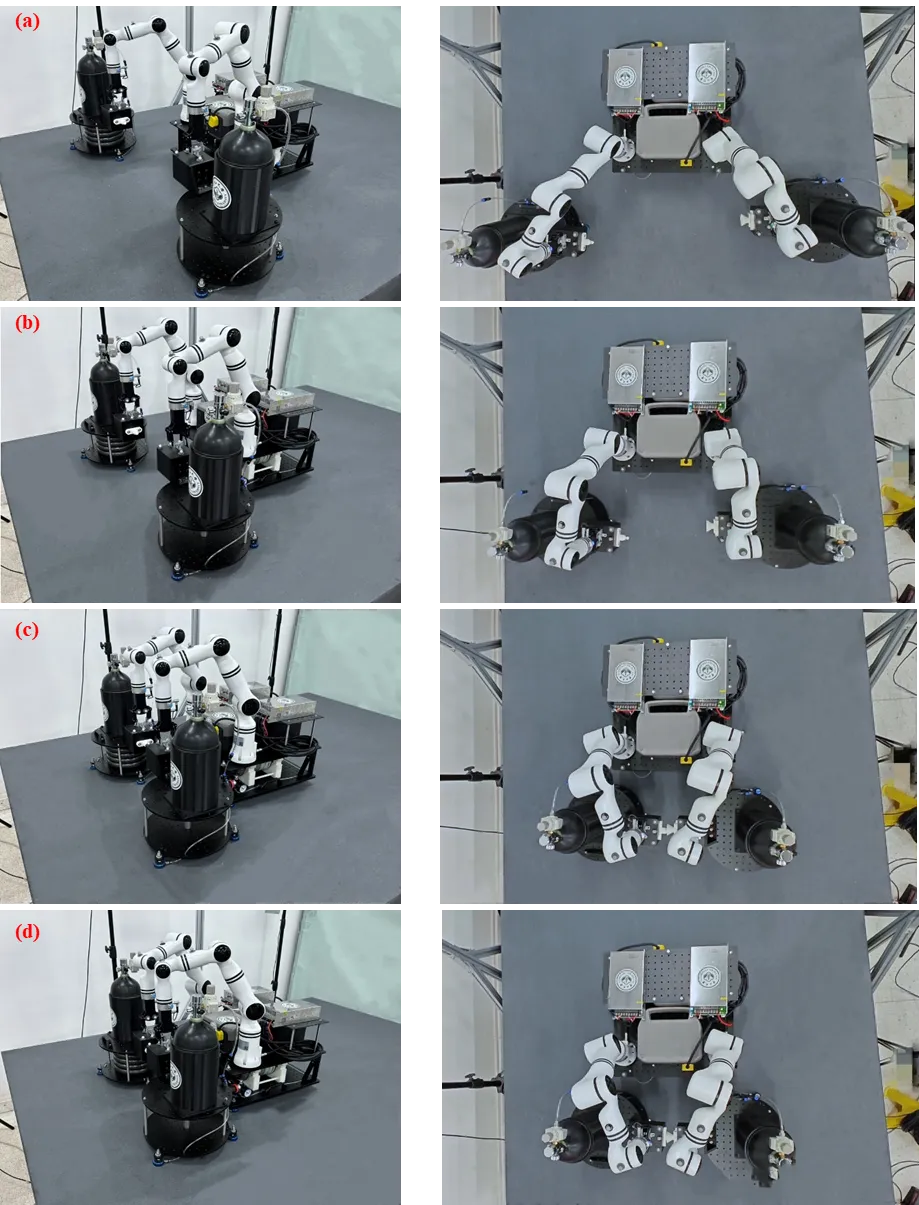
基于中山大学SPOT装置,研究团队开展了多组针对不同惯量参数的目标模块在轨组装地面气浮模拟实验,典型的实验过程如图 4 所示。实验结果表明,双臂末端轨迹与数值仿真预测位置偏差均值低于 1.5 mm,姿态偏差小于 0.2°。在装配过程中,基座的最大漂移幅度控制在 3 mm 以内,表明惯量自适应规划方法有效抑制了反作用引起的基座自由漂移。在装配效率方面,该方法在不同构型与载荷条件下均表现出显著优势:装配任务的平均执行时间较传统 PSO 方法缩短约 30%–60%。装配过程的定位误差约为 ±1 mm 量级,与仿真结果的差异小于 8%。这些实验结果进一步证实了所提出的惯量自适应轨迹规划方法在实现精确高效协同装配方面的有效性,为未来快速精准装配更大尺寸、更大惯量的航天结构研究打下了理论与技术基础。
PART4 第一作者简介

王塬欣,中山大学航空航天学院2022级博士研究生,研究方向为大型航天结构空间组装动力学、控制以及实验。
文案 | 飞行器动力学与控制团队
排版|梁靖靖
初审 | 蒋建平 张怀钦
审核 | 张锦绣 赵晓江
审核发布 | 罗愈业


