
科研动态 | 中山大学吴志刚教授团队在机器人领域中科院一区期刊Cyborg and Bionic Systems发表最新成果
双稳态结构因其在状态切换过程中具备被动触发与零能耗保持等优势,近年来在机器人与无人系统中受到广泛关注。作为无人机栖停系统中的关键执行部件,双稳态机械抓取器能够显著降低飞行器在栖停过程中的控制复杂度与能量消耗。然而,现有双稳态抓取器多采用固定能量壁垒设计,难以在“柔顺触发”与“稳定抓取”之间取得兼顾,限制了其在复杂环境下的实际应用。
针对上述问题,中山大学吴志刚教授团队提出了一种基于磁力张拉整体结构的双稳态机械抓取器,利用磁力非线性特性实现自适应能量壁垒调制:在触发阶段呈现低能量壁垒以实现柔顺触发,在抓取保持阶段形成高能量壁垒以确保稳定抓取。研究成果以 “Magnetic Tensegrity-Enabled Robotic Gripper with Adaptive Energy Barrier for UAV Perching” 为题发表于 Cyborg and Bionic Systems 期刊(中科院一区,IF18.1)。中山大学航空航天学院2024级博士研究生韩路路、香港科技大学博士后研究员杨昊为共同第一作者,中山大学航空航天学院吴志刚教授、大连理工大学助理研究员张捷和中山大学先进制造学院吴嘉宁教授为共同通讯作者。
研究亮点
磁力张拉双稳态设计:将传统张拉结构中的中央弹簧替换为磁相互作用,利用磁力的非线性特性构建自适应能垒,实现触发敏感性与抓握稳定性的兼得。
触发力仅0.12牛,抓持力高达35牛:力比接近300倍,可轻柔抓取香蕉等易损物体,同时能稳定承载2公斤以上负载。
毫秒级响应,千次循环稳定:触发过程仅需42毫秒,经1000次循环测试,触发力保持稳定,展现优异的机械可靠性。
气囊辅助复位,实现重复使用:集成轻量化气囊(1.5克),通过精密控压实现15秒内快速复位,大幅提升操作效率。
无人机平台验证多场景应用:成功实现树枝停靠、环境监测、高精度定位网络构建及精准物资投送等任务。
图文导读
在自然界中,许多生物通过结构与能量景观的被动耦合实现高效、可靠的附着行为。例如,蝙蝠在倒挂栖息时,体重作用可被动拉紧其后肢肌腱,使抓握力随载荷增加而增强,从而实现无需持续肌肉发力的稳定悬挂(图1A)。受此启发,本研究提出了一种磁张拉整体双稳态抓取结构,通过磁吸引力与拉索约束共同构建系统的双稳态能量景观,使抓取行为的“柔—刚转变”直接内嵌于结构本身。

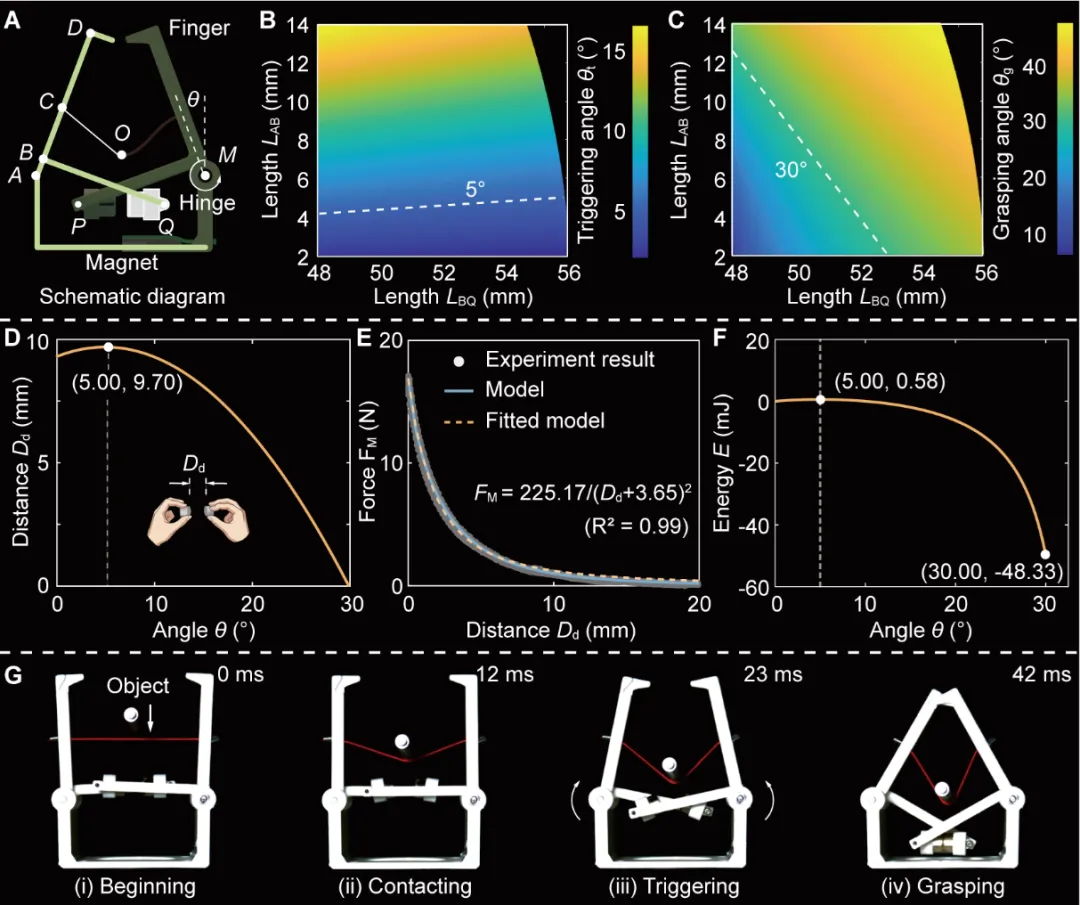
为揭示磁体参数与几何构型对系统能量壁垒的影响机制,研究人员建立了磁—结构耦合的力学模型,对双稳态系统在不同构型下的势能分布进行了定量分析。结果表明,磁体间距与排布方式可显著调控正向触发与反向解锁过程中的能量壁垒差异(图2)。在此基础上,结合实验手段,系统测试了物体尺寸、接触位置对抓取触发力的影响(图3),验证了该抓取器在极低触发力条件下的柔顺触发能力。此外还测试了触发的抗干扰性能,结果显示,触发需要的位移行程大概为18.40 mm,能够抵抗较大的抖动干扰。

随后,研究进一步从理论与实验两方面分析了抓取保持阶段的稳定性。通过改变外加载荷与接触条件,对抓取失效力进行了系统测试(图4)。实验结果显示,该抓取器在保持阶段可形成显著高于触发阶段的能量壁垒,实现两个数量级以上的触发力—失效力比值,从而在无需持续供能的情况下保证可靠抓取。

为实现抓取器的可重复使用,本研究引入了一种轻量化气囊复位机制。通过短时充气克服磁体吸引力即可完成解锁复位,停止充气后系统被动回到初始稳定状态(图5)。相关实验验证了该复位方案在重复性、可靠性与系统集成方面的可行性。

最后,研究人员将该磁性张拉整体双稳态抓取器集成至四旋翼无人机平台,开展了真实环境下的无人机栖停实验(图6)。实验结果表明,该系统可辅助无人机在树枝、杆状结构等目标上实现稳定栖停,其能耗相比持续悬停显著降低。相较于传统固定能量壁垒抓取方案,本研究所提出的结构能够在柔顺触发与稳定抓取之间实现自适应平衡,有效缓解无人机栖停过程中“易触发但不稳定”或“稳定但不柔顺”的固有矛盾。


论 文 信 息
期刊:Cyborg and Bionic Systems
题目:Magnetic Tensegrity-Enabled Robotic Gripper with Adaptive Energy Barrier for UAV Perching
作者:Lulu Han†, Hao Yang†, Luobin Wang, Yuquan Zheng, Jingrui Yang, Yuxuan Fu, Jieliang Zhao, Zhong Wan, Zhigang Wu*, Jie Zhang*, Jianing Wu*
DOI:10.34133/cbsystems.0535
论文链接:https://spj.science.org/doi/10.34133/cbsystems.0535
供稿 | 韩路路
排版 | 黄卓毅
初审 | 吴嘉宁 张怀钦
审核 | 张锦绣 赵晓江
审定发布 | 罗愈业


