科研成果 | 张锦绣教授团队在机器人领域顶刊 IEEE T-Ro发表论文
刚柔耦合结构 + 捏吸混合机制
赋能多模态抓手实现通用性抓取
通用性抓取(Universal Grasping)——即无需定制化调整即可适应各类物体与任务的抓取能力,对机器人抓手至关重要。其核心之一在于设计具有灵活性与自适应能力的抓手,使机器人能像人类一样应对未知物体与复杂环境。然而,物体在重量、脆性、尺寸、形状等物理属性上的巨大差异,使得这一目标长期面临严峻挑战。
既往研究主要通过两种策略提升机器人抓手的抓取多样性:
(1)多抓取机制融合。由于各种抓取机制都有其适用范围,例如,基于包络抓取方式的抓手难以抓取扁平状的物体,基于吸附机制的抓手难以处理多孔物体;若能与象鼻一样集成捏合和吸附两种抓取机制,机器人抓手能拥有更好的适应性;
(2)刚柔结构耦合。刚性抓手虽然能够提供高输出力和高精度,但其适应能力差;而柔性抓手具有优良的适应性但其负载能力差。因此,模拟人手指这种内部高硬度骨骼搭配外部肌肉和皮肤等柔性组织的刚柔耦合结构,能够同时保证较高的结构强度和良好的适应性。
然而,在现有机器人抓手中,常会出现各抓取机制之间或刚柔结构之间互相冲突,无法发挥出各自优势的问题。此外,如何在确保紧凑和高性能的同时,将这两种策略有效地集成到一个机器人抓手中,是一个具有挑战性的问题,这需要简单有效的耦合机构,而以往的研究很少对这一问题进行探讨。
为了解决这一问题,该研究提出了一种混合多模式抓手(HMG),将捏-吸混合抓取机制与刚-柔耦合结构融合,破解机器人抓手的抓取多样性困局。日前,该研究成果以“Enhancing Grasping Diversity with a Pinch-Suction and Soft-Rigid Hybrid Multimodal Gripper”为题,在机器人领域顶刊IEEE Transactions on Robotics(中科院一区,IF = 9.4)发表,博士生赵郁文和朱嘉淇为共同第一作者,中山大学张锦绣教授、吴嘉宁副教授以及华中科技大学吴志刚教授为共同通讯作者。该研究曾获软体机器人创新设计大赛二等奖。

多操作模式设计
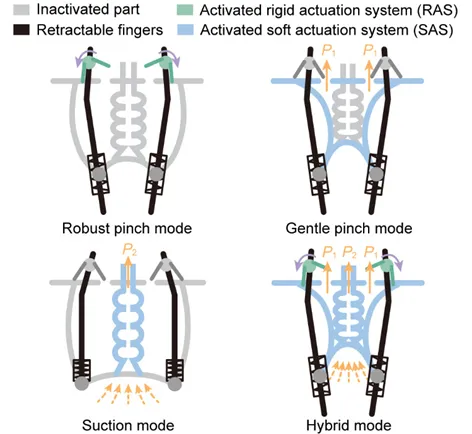
该抓手拥有刚、柔两套驱动系统,通过两套系统的独立或协同驱动,可以提供四种不同的操作模式:强力捏合模式、轻柔捏合模式、吸附模式、以及混合操作模式。利用这四种操作模式,HMG可以处理不同物体,应对多种抓取任务。例如,在强力捏合模式下可以很轻松的抓起一个哑铃;在吸附模式下抓起一些超出抓手两指范围的体积较大的物体,如篮球;同时利用捏合和吸附两种操作来提升抓取的稳定性等等。
简单有效的耦合机构设计
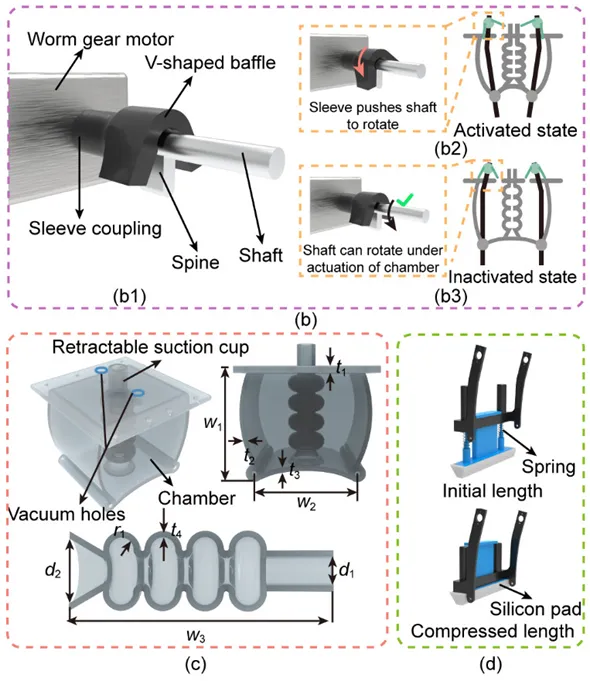
首先,这款抓手中采用了一种选择性激活机构(SAM),通过调整SAM即可实现刚性和柔性驱动系统之间的完全解耦,从而融合它们各自的优势。其次,还引入了一种柔顺自适应机构,其由一对被动伸缩手指和一个可伸缩的柔性吸盘组成,这一机构使抓手能够在捏合和吸附模式之间自适应切换,而无需额外的致动器或主动控制,从而大大降低了系统的复杂性。
广泛的抓取多样性
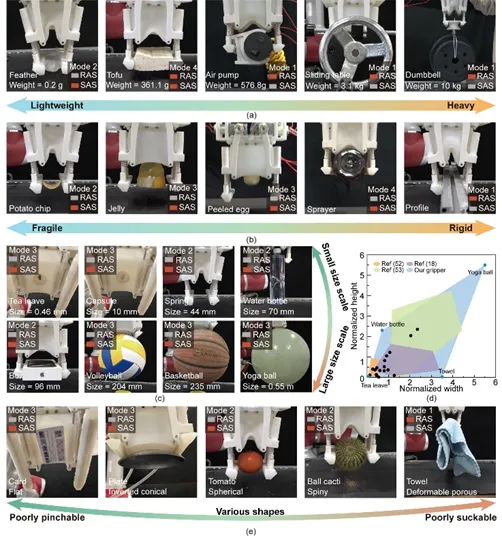
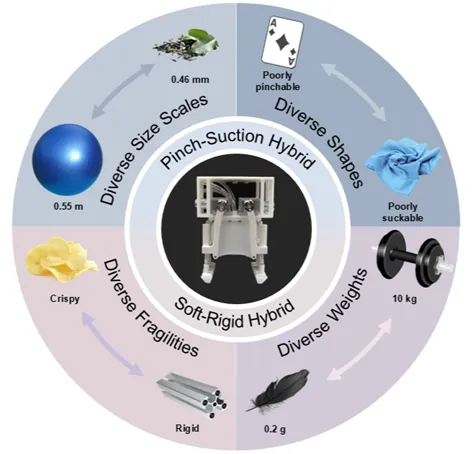
柔性结构使抓手能够利用轻柔捏合和吸附模式柔顺地接触各种易碎物品,从而极大拓宽了抓手安全地处理轻质、易碎物品的能力;而与之互补的刚性模式,也就是强力捏合模式,则显著提高了抓手抓取重量较大、材质较硬物体的能力。因此,在重量层面,HMG能捏起轻至0.2 g的羽毛,也能提起重达10 kg的哑铃;在脆弱程度层面,HMG能轻柔的抓起酥脆的薯片、易变形易碎的果冻,也能轻易抓住硬质的铝合金。
此外,在尺寸层面,HMG能利用吸附模式抓取小至0.46 mm的茶叶,大到0.55 m直径的瑜伽球;在形状层面,HMG则利用捏合模式和吸附模式互补的特性,可以极为高效地抓取一些单一操作模式非常难以操作的形状的物体,如扁平状的卡片、倒锥体状的盘子等难以捏合的形状,以及带刺的仙人球、多孔的毛巾等无法吸附的物体。
极强的鲁棒性和适应性
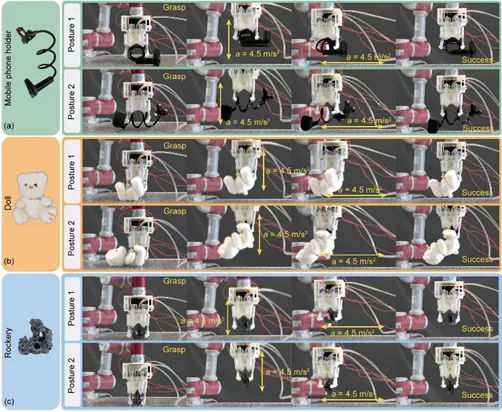
鲁棒性和适应性是机器人抓手的两项重要性能指标,HMG展现出了在4.5 m/s2加速度的动态环境中稳定地抓住多种处于不同姿态的不规则形状的物体(如玩偶、手机支架、小假山等)的能力。
应对复杂操作任务
在执行复杂现实世界操作任务方面,HMG同样展现出不俗的能力,能够利用多种模式的连续协作,完成书籍整理、倒牛奶、甚至是煲汤等进阶操作。
流水线操作
稳定抓取运动的物体对于机器人抓手来说也很重要,例如流水线操作。在这一场景下,HMG通过先用轻柔捏合建立与物体的稳定接触,之后切换到强力捏合模式来提供足够的抓取力,从而能够快速且稳定地抓取流水线上的水果。
水下作业
由于HMG拥有轻柔操作的能力,因此在海底沉积物及水产品无损采样、水下考古、垃圾收集等方面具有巨大应用潜力,展现出了水下应用的多样性。
感知闭环抓取
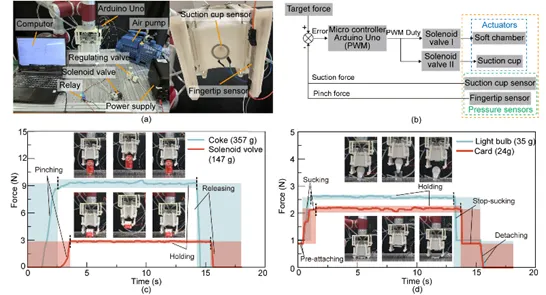
最后,通过在指尖和吸盘入口处集成柔性压力传感器的方式,赋予HMG在与物体交互过程中的感知能力,从而能够按照预定指令完成闭环抓取任务。
在以上这些实际任务中的优异表现,展示了HMG在日常生活、工业生产、水产养殖等多个领域的广阔应用前景。该研究通过同时将多抓取机制与刚柔耦合结构融合到同一抓手中,首次展示了拓展抓取多样性的巨大潜力,并为多模式协作机制提供了简单有效的方案,其原理和机构设计可为未来高性能机器人抓手的开发提供有价值的参考。
主要作者信息介绍
通讯作者:
张锦绣教授,中山大学航空航天学院副院长/博导、科技部重点研发计划项目首席科学家、多个卫星型号主要负责人,微小型航天器系统技术团队负责人。
团队研究围绕深空探测、微小卫星及空间机器人展开,主要包括:
1. 智能微小卫星技术:智能纳星设计与研制、集群智能涌现与控制等;
2. 超高精度空间惯性传感器锁紧释放机构及力位移协同控制;
3. 空间仿生操作技术:空间站舱内柔性机器人、仿生嗅觉导航与路径规划。
长期欢迎对该领域感兴趣的研究生、博士后和专职科研人员来学习、交流、或开展真诚合作。
吴嘉宁副教授,中山大学先进制造学院副院长/博导、国家优青,仿生界面及未来制造实验室负责人。
团队主要围绕机械系统可靠性、仿生机械与仿生智能机器人展开研究,以动力学基本理论与方法为基础,以可展结构及动物体为研究对象,结合仿生技术,给出全新的机械可靠性评估方法与仿生机器人设计思路。目前的研究方向为机械工程、仿生物理及仿生机器人,主要包括:航天器关键部件的性能退化机制及动态可靠性评估、动物行为智能及仿生航天机器人。团队研究已在Nature Nanotech., Natl. Sci. Rev., PNAS, Research, Adv. Mater., Adv. Funct. Mater., IEEE T-Ro, IEEE/ASME T-Mech, Device等国际知名期刊发表,研究成果被多个国内外知名媒体平台转载报道。
长期欢迎对该领域感兴趣的研究生、博士后和专职科研人员来学习、交流、或开展真诚合作。
第一作者:
赵郁文,中山大学2024级博士研究生,研究方向为仿生机器人/无人机抓手设计与系统集成。曾获中山大学一等奖助金、三星奖学金、光大奖学金等,曾获中国国际大学生创新大赛广东省分赛金奖、软体机器人创新设计大赛二等奖、世界大学生立方星挑战赛中国区总决赛一等奖等多个奖项,曾登中大“百名优秀学子”系列报道。发表一区论文5篇(一作/共同一作3篇,含T-Ro,T-Mech等机器人/自动化领域顶刊3篇,Research综合性期刊1篇),申请发明专利11项(1项已授权)。研究成果被机器人大讲堂、DeepTech等公众号报道。
论文信息:
Title: Enhancing Grasping Diversity with a Pinch-Suction and Soft-Rigid Hybrid Multimodal Gripper
Authors: Yuwen Zhao, Jiaqi Zhu, Jie Zhang, Siyuan Zhang, Maosen Shao, Zhiping Chai, Yimu Liu, Jianing Wu*, Zhigang Wu*, Jinxiu Zhang*
Journal: IEEE Transactions on Robotics
Website: https://ieeexplore.ieee.org/document/11025142
DOI: 10.1109/TRO.2025.3577014
文案 | 赵郁文
排版 | 敖欣茹
初审 | 张怀钦
审核 | 张锦绣 赵晓江
审核发布 | 罗愈业