科研动态 | 张锦绣教授团队在领域顶刊Aerospace Science and Technology发表论文
随着海洋资源开发和海上安全需求的不断提升,人们对无人系统提出了更高要求——不仅需要具备长航时监视能力,还要能够在复杂海洋环境中实现快速拦截与协同防御。双旋翼空水两栖飞行器(Dual-rotor Aerial-Aquatic Vehicle, DR-AAV)既可在水下实现隐蔽航行,又能够迅速跃出水面进入高速飞行状态。相较于传统无人机(Unmanned Aerial Vehicle, UAV)和无人水面艇(Unmanned Surface Vehicle, USV),DR-AAV展现出更强的任务适应性与环境适应能力。在集群部署模式下,DR-AAV集群具备开展协同伏击、动态跟踪以及联合围捕等复杂任务的能力,可用于应对对海域安全及关键基础设施构成威胁的无人水面艇集群。然而,DR-AAV严格的动力学约束、速度与姿态之间的强耦合特性,以及海上通信带宽受限条件下的分布式协同需求,使其在执行驱逐与围捕海上无人集群任务时仍面临诸多挑战。
针对这一问题,中山大学张锦绣教授团队以“Osprey-fish gaming inspired planning and intelligent control of dual-rotor AAV swarm for cooperative hunting USV swarm”为题,在航空航天领域顶刊《Aerospace Science and Technology》(中科院一区,top, IF = 5.8)上发表论文。2024级博士生王立栋为第一作者,中山大学张锦绣教授、日本东北大学林名培助理教授为共同通讯作者。该论文中双旋翼跨介质无人机(潜鸟1号)曾获全国海洋航行器设计与制作大赛一等奖。此外,该研究得到了国家自然科学基金、广东省重点领域研发计划“海洋科技”重大专项旗舰项目、广东省特支项目以及南方海洋科学与工程广东省实验室(珠海)的资助。

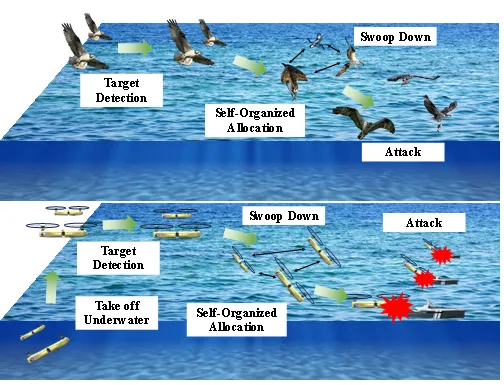
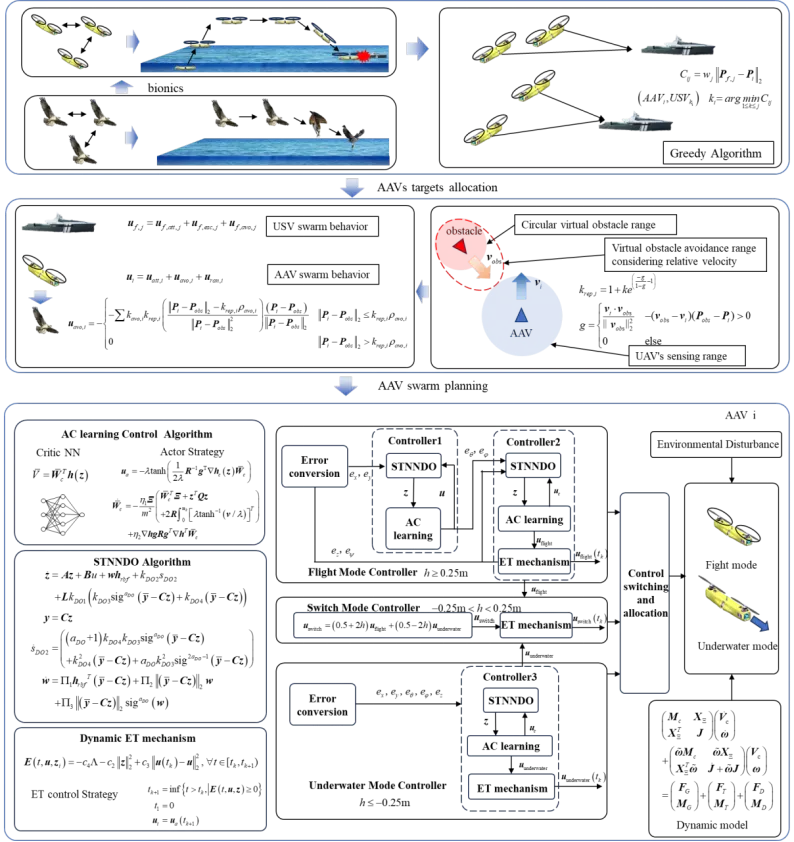
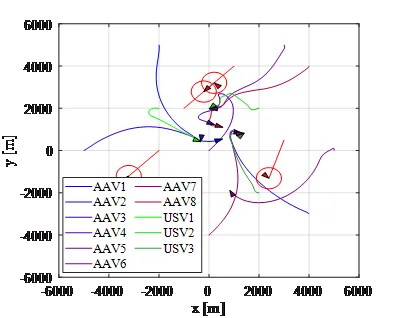
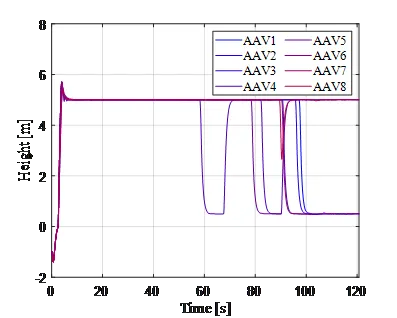
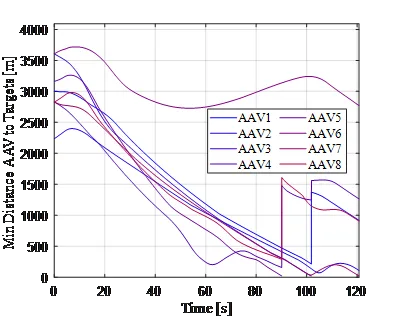
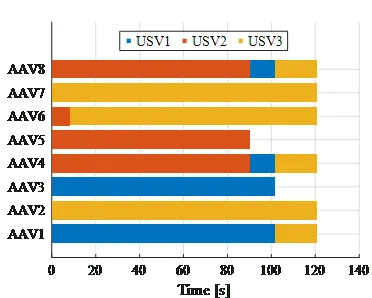
本文提出了一种面向DR-AAV集群围捕任务的规划与控制一体化框架。在规划层面,借鉴鱼鹰捕猎行为,设计了一种感知驱动的围捕策略。该策略引入相对速度与目标逃逸方向感知机制,使系统能够自适应调整感知半径并进行动态调节,从而在复杂海洋动态环境中实现多机间的协同围捕。在控制层面,构建了一种融合输入约束的Actor-Critic学习控制方法,并结合动态事件触发机制,实现高效灵活的位姿跟踪控制。同时,引入超扭曲神经网络扰动观测器,对未建模动态进行在线估计,在减少神经网络基函数数量的同时,提高系统鲁棒性与计算效率。仿真结果表明,该框架可支持DR-AAV集群在开阔海域、动态障碍环境及多任务场景中有效完成对USV集群的围捕任务。相较于传统人工势场规划与自适应滑模控制方法,所提方法在避障性能上更优,总围捕时间缩短约20%,执行器触发次数降低至时间触发控制的7%–22%。
| |
| 
|
| 
|
| |
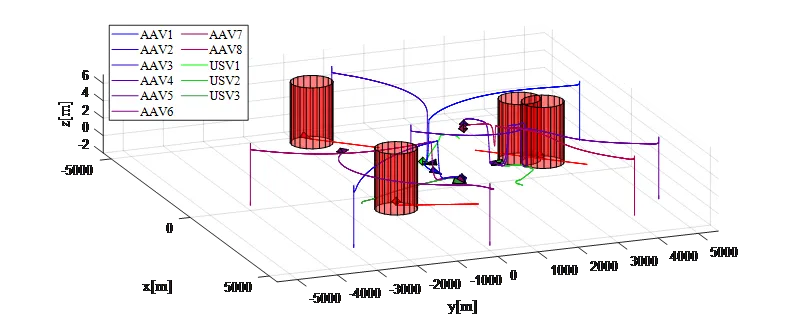
图4 DR-AAV集群对USV集群的围捕仿真
该研究提出的规划与控制一体化框架显著提升了空水两栖飞行器集群在复杂海洋环境下的协同作业能力,为跨介质无人系统执行高动态对抗与协同围捕任务提供了有效技术支撑。为海上安全防护、资源巡检及应急处置等领域的工程应用具有良好的指导意义。
通讯作者

中山大学航空航天学院副院长/博导、科技部重点研发计划项目首席科学家、广东省特支计划科技创新领军人才、我国首个编队干涉SAR卫星系统“天绘二号”卫星副总设计师、全球高校首颗月球探测微卫星“龙江二号”卫星总设计师、空间引力波探测实验卫星“天琴一号”地面系统副总指挥。研究领域主要包括深空探测航天器系统复杂动力学与智能控制理论、跨介质智能两栖无人机及其集群协同机理、智能微小型航天器系统设计及集群空间博弈。

日本东北大学材料科学高等研究所(WPI-AIMR)助理教授。其研究方向主要包括主要研究包括动力系统理论、航天器动力学与控制,相关研究应用于限制性三体问题和耦合非线性振子系统等领域。以第一作者/通讯作者在Aerospace Science and Technology;SPACE: SCIENCE & TECHNOLOGY;Journal of Guidance, Control, and Dynamics等期刊发表论文二十余篇。
第一作者

中山大学航空航天学院2024级博士研究生,研究方向为跨介质无人机集群博弈。曾获全国海洋航行器设计与制作大赛一等奖、中国研究生未来飞行器创新大赛一等奖等多个奖项。目前以第一作者(除导师外)发表中科院一区论文3篇。
引用格式
Wang L, Zhong Y, Wang P, et al. Osprey-Fish Gaming Inspired Planning and Intelligent Control of Dual-rotor AAV Swarm for Cooperative Hunting USV Swarm[J]. Aerospace Science and Technology, 2026: 112008.
文章链接
https://www.sciencedirect.com/science/article/pii/S1270963826003883
供稿 | 王立栋
排版 | 敖欣茹
初审 | 张怀钦
审核 | 张锦绣 赵晓江
审核发布 | 罗愈业