科研动态 | 张锦绣教授、刘源教授团队在领域顶刊Aerospace Science and Technology发表论文
研究背景与意义
在轨服务任务,包括在轨加注、空间碎片清除、在轨组装与维修等,已成为当前航天技术发展的重要方向。其中,航天器自主近距离操作是实现上述任务的核心关键技术之一。在复杂轨道环境下,服务航天器需要对目标航天器实施安全、稳定且高精度的近距离逼近与操作。该过程面临多方面技术挑战:一方面,航天器平动与姿态动力学之间存在显著耦合特性,亟需建立统一的六自由度建模与控制框架;另一方面,系统还需同时满足接近走廊、传感器视场角等多种空间运动约束,并应对执行器饱和及外部扰动等实际工程因素的影响。现有控制方法大多采用姿轨解耦设计、渐近稳定控制或单一约束处理策略,难以在预设时间内同时实现相对位姿协同收敛、约束严格满足以及输入受限条件下的闭环稳定性。因此,如何兼顾控制可行性、约束安全性与瞬态性能,仍是航天器自主近距离操作领域亟待解决的重要问题。
研究成果
针对航天器近距离操作过程中存在的运动约束、执行器饱和及外部扰动条件下的六自由度姿轨耦合控制问题,中山大学张锦绣教授团队提出了一种基于扭量与两阶段固定时间预设性能控制的自主接近控制方法,相关成果以“Twistor-based two-stage fixed-time prescribed performance control for spacecraft proximity operations under motion constraints”为题发表于航空航天领域国际期刊Aerospace Science and Technology。论文第一作者为航空航天学院博士后张谕,通讯作者为刘源教授。
图1 论文首页部分截图
研究方法与结论
针对复杂约束条件下的姿轨耦合控制难题,研究团队提出了一种基于扭量表示与两阶段固定时间预设性能控制的六自由度相对运动控制方法。首先,在服务航天器本体坐标系下,基于扭量建立统一的航天器相对运动模型,避免了对偶四元数建模中存在的单位范数约束与参数冗余问题,实现了接近走廊约束与视场角约束的统一描述。在此基础上,研究团队设计了一种具有固定时间收敛特性的两阶段控制框架:第一阶段在预设时间内快速调整相对姿态,使接近走廊几何关系逐渐趋于准静态;第二阶段进一步收紧位置性能包络,从而实现对接近走廊约束与视场角约束的同时严格满足。此外,通过引入辅助动态补偿机制,有效提升了系统在执行器饱和与外部扰动条件下的控制鲁棒性与稳定性。仿真结果表明,所提出的方法能够在预设时间内实现航天器相对位姿的快速收敛,并在整个接近过程中始终满足传感器视场约束,同时在第二阶段严格满足接近走廊约束。即使在初始约束违规条件下,系统仍能够安全恢复至满足约束的期望轨迹。相比传统预设性能控制(PPC)方法及 PD+ 控制器,所提方法在跟踪精度、约束满足能力以及抗扰鲁棒性等方面均表现出更优的综合性能。
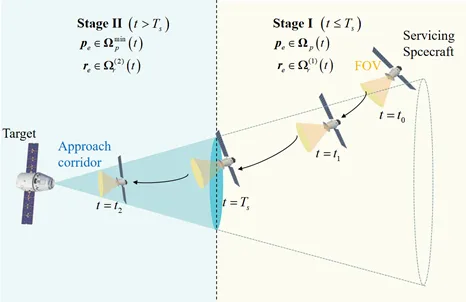
图2 航天器近距离操作两阶段控制策略示意图
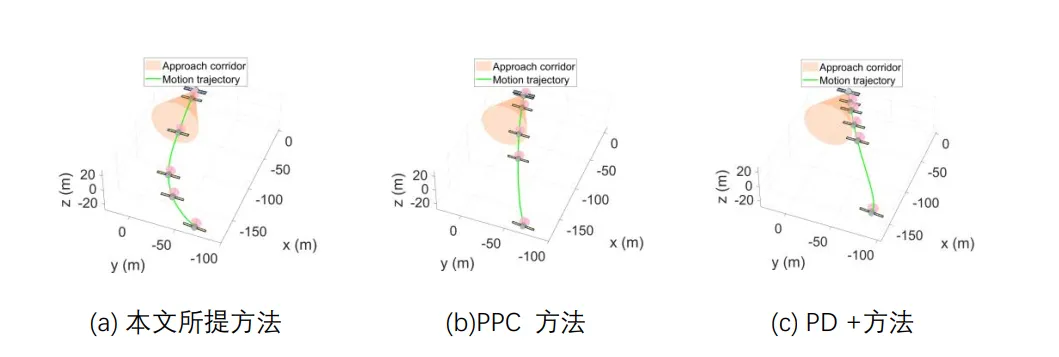
图3 不同控制方法下三维相对运动轨迹
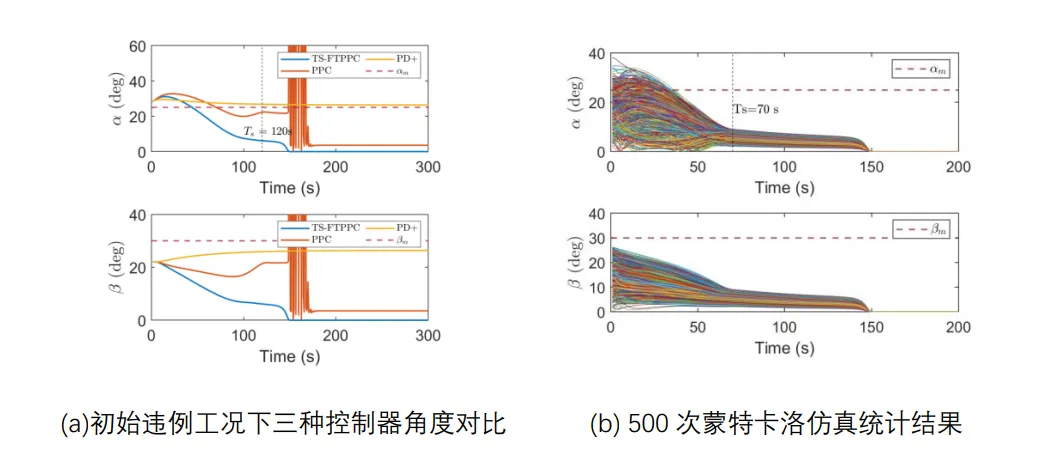
图4 不同工况下接近走廊角与视场角约束满足情况
RESULT
该研究提出的两阶段固定时间预设性能控制框架,提升了航天器在复杂约束条件下的自主接近与安全操作能力,可有效应对初始约束违规、执行器饱和以及外部扰动等复杂工况,为我国在轨服务、空间碎片清除等空间任务的自主化与智能化发展提供了重要技术支撑。
作者介绍

张锦绣教授
中山大学航空航天学院副院长/博导、科技部重点研发计划项目首席科学家、广东省特支计划科技创新领军人才、我国首个编队干涉SAR卫星系统“天绘二号”卫星副总设计师、全球高校首颗月球探测微卫星“龙江二号”卫星总设计师、空间引力波探测实验卫星“天琴一号”地面系统副总指挥。研究领域主要包括深空探测航天器系统复杂动力学与智能控制理论、跨介质智能两栖无人机及其集群协同机理、智能微小型航天器系统设计及集群空间博弈。

刘源教授
中山大学航空航天学院教授、博导,曾历任多个导弹和卫星型号副主任/主任设计师/副总设计师。先后承担与参与863、973、高分专项、军科委创新特区、国防预研项目等十余项,在小卫星的综合电子系统、任务规划等技术方面积累了较为丰富的知识和经验。发表学术论文20余篇,申请并授权专利近十项,获国防科技进步一等奖一项。

张谕
中山大学航空航天学院博士后,主要从事航天器自主接近与编队飞行控制研究,研究方向包括航天器姿轨耦合动力学与控制、复杂约束下的近距离操作控制、预设性能控制与固定时间控制等,在航天器安全自主接近与约束控制方面开展了系统研究。
论 文 信 息
引用格式:
Zhang Y, Zhang J X, Chen Z B, et al. Twistor-based two-stage fixed-time prescribed performance control for spacecraft proximity operations under motion constraints[J]. Aerospace Science and Technology, 2026, 178: 112383.
论文链接:https://www.sciencedirect.com/science/article/abs/pii/S1270963826007637
供稿 | 张谕
排版 | 黄卓毅
初审 | 张怀钦
审核 | 张锦绣 赵晓江
审定发布 | 罗愈业