
科研动态 | 飞行器动力学与控制团队在航天器在轨组装动力学与控制领域研究取得进展
01 成果展示一、研究背景与意义 随着人类空间探索能力的持续发展,建设如空间太阳能电站、大型空间望远镜等超大型航天结构已成为未来的战略重点。这类结构通常尺度达数千米量级,远超现有运载火箭的整流罩尺寸和承载能力,须采用模块化设计、在轨组装进行构建。与传统航天器“构型固定、参数定常”不同,高频次操作下的在轨组装过程中航天器构型持续增长、参数发生跃变,系统柔性特性逐步凸显,接触碰撞也会产生复杂的局部冲击,轨道运动、姿态运动与结构弹性变形之间的耦合增强,由此也带来新的问题:传统建模仿真方法的适应性不足、多任务需求对控制设计提出综合要求、控制效能可能随组装进程衰减等。

科研动态 | 中山大学张清凌教授团队在遥感顶刊IEEE J-STARS发文:少样本、强泛化,DFANet革新无人机果园智能监测
摘要 面向智慧农业中果树冠层精准管理的迫切需求,我院张清凌教授团队在遥感领域权威期刊IEEE J-STARS发表最新研究成果。该研究针对无人机影像果树树冠实例分割长期面临的“标注成本高昂”与“跨域迁移性能骤降”两大核心瓶颈,创新性地提出了DFANet框架。该方法在仅需10%目标域标注样本的极端条件下,通过半监督学习与双层域对齐机制,实现了模型在不同果园乃至不同树种间的稳定、高效迁移,并显著提升了密集树冠的边界分割精度。这项工作不仅为果园生产的精细化、智能化管理提供了强有力的算法工具,其“以少驭多、稳而弥坚”的核心思想,也为航天对地观测领域中处理海量、多样、标注稀缺的遥感数据提供了极具价值的解决范式。
科研动态 | 中山大学田立丰副教授团队在超声速来流-射流-凹腔作用上取得研究进展
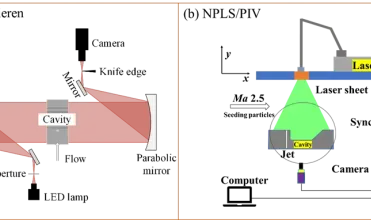
超燃冲压发动机凹腔燃烧室内的三维流场十分复杂,内部的来流-射流-凹腔相互作用直接影响燃料射流的混合效率。近日,航空航天学院田立丰团队针对超声速来流-射流-凹腔耦合这一关键问题,在马赫2.5超声速风洞中,采用时间分辨纹影、NPLS、PIV等多种先进光学非接触诊断技术,对不同射流-来流动量通量比下的混合流场进行了评估。相关研究成果以“Effects of jet-to-freestream momentum ratio on freestream-jet-cavity interactions in a supersonic crossflow”为题发表于航空航天领域权威期刊《Acta Astronautica》上。中山大学航空航天学院2024级博士生王澳为第一作者,中山大学航空航天学院田立丰副教授为通讯作者,中山大学航空航天学院为第一通讯单位。

心沐暖阳,航启新程 | 航空航天学院召开2026年春季学期学生工作会议
3月25日中午,我院于深圳校区理学园220会议室召开2026年春季学期学生工作专题会议,学院党委副书记赵晓江主持会议,学院全体辅导员、毕业年级班主任参与会议。

科研动态 | 张锦绣教授团队在领域顶刊Aerospace Science and Technology发表论文
随着海洋资源开发和海上安全需求的不断提升,人们对无人系统提出了更高要求——不仅需要具备长航时监视能力,还要能够在复杂海洋环境中实现快速拦截与协同防御。双旋翼空水两栖飞行器(Dual-rotor Aerial-Aquatic Vehicle, DR-AAV)既可在水下实现隐蔽航行,又能够迅速跃出水面进入高速飞行状态。相较于传统无人机(Unmanned Aerial Vehicle, UAV)和无人水面艇(Unmanned Surface Vehicle, USV),DR-AAV展现出更强的任务适应性与环境适应能力。在集群部署模式下,DR-AAV集群具备开展协同伏击、动态跟踪以及联合围捕等复杂任务的能力,可用于应对对海域安全及关键基础设施构成威胁的无人水面艇集群。然而,DR-AAV严格的动力学约束、速度与姿态之间的强耦合特性,以及海上通信带宽受限条件下的分布式协同需求,使其在执行驱逐与围捕海上无人集群任务时仍面临诸多挑战。

3月17日-18日,2026第二届商业航天产业发展大会暨商业航天展在深圳国际会展中心隆重举办。中山大学航空航天学院院长吴志刚教授率领学院师生代表参会,全面展示学院在商业航天领域的科研创新成果、学科建设成效及人才培养成果,积极搭建产学研协同交流桥梁。 本届大会以“创新跃迁、筑梦太空”为核心主题,汇聚国内商业航天领域顶尖专家、行业领军企业及科研院所代表,围绕低轨卫星星座建设、商业发射技术突破、航天智能制造、空天融合应用等前沿议题,开展专题报告、成果展示与合作洽谈,为商业航天产业高质量发展凝聚共识、汇聚力量。
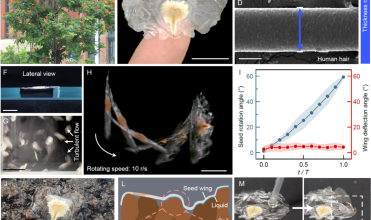
科研动态 | 中山大学吴志刚教授团队在综合类顶刊National Science Review发文:揭秘风媒种子膜翼的力学奥秘与仿生设计启示
近日,航空航天学院吴志刚教授团队系统阐释了这枚种子翅膀背后的力学设计机理,揭示了其如何通过独特的异质结构,在轻量化、刚度、韧性及环境适应性间取得卓越平衡,并为新一代被动式微型飞行器的设计提供了崭新的思路。相关研究成果以“Ultrathin seed wing with heterogeneous structures for highly efficient dispersal of African tulip tree”为题发表于National Science Review期刊(中科院一区,IF=17.1)。
科研动态 | 中山大学吴志刚教授团队在机器人领域中科院一区期刊Cyborg and Bionic Systems发表最新成果
中山大学吴志刚教授团队提出了一种基于磁力张拉整体结构的双稳态机械抓取器,利用磁力非线性特性实现自适应能量壁垒调制:在触发阶段呈现低能量壁垒以实现柔顺触发,在抓取保持阶段形成高能量壁垒以确保稳定抓取。研究成果以 “Magnetic Tensegrity-Enabled Robotic Gripper with Adaptive Energy Barrier for UAV Perching” 为题发表于 Cyborg and Bionic Systems 期刊(中科院一区,IF18.1)。

中国力学学会动力学与控制前沿交叉高端论坛在中山大学深圳校区成功举办
2026年1月23日至25日,由中国力学学会动力学与控制专业委员会主办、中山大学航空航天学院承办的 “中国力学学会动力学与控制前沿交叉高端论坛” 在中山大学深圳校区成功举办。来自全国动力学与控制领域的知名专家、学者齐聚鹏城,围绕学科前沿问题、关键理论方法及工程应用核心挑战展开深入研讨,共话学科发展新蓝图。

2026年1月25日至26日,第八届全国航天飞行动力学技术研讨会在广东深圳顺利落幕。本次会议以“创新、融合、引领——新时代的航天飞行动力学”为主旨,以“航天飞行动力学前沿问题与工程应用”为主题,由航天飞行动力学技术重点实验室主办,西北工业大学航天学院、中山大学航空航天学院联合承办。

