
科研动态 | 飞行器动力学与控制团队在柔性航天器姿态控制领域研究取得进展
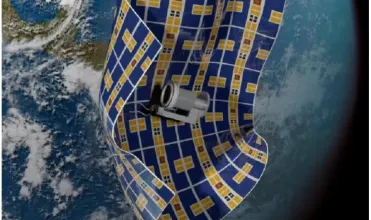
研究背景与意义 随着人类对太空持续开发利用,空间碎片的数量在持续增加,严重威胁着巨型卫星星座、空间站等在轨航天器的安全运行。为了清除小型空间碎片,NASA创新先进概念项目提出了薄膜航天器(Brane Craft)的概念,用超轻质量、超低成本的方式接近、包裹和清除空间碎片。薄膜航天器是一种不含任何支撑结构的二维航天器,其太阳能电池、传感器、控制执行器、计算机等都嵌入到基底薄膜中,具有质量轻、成本低、速度增量大、避免刚性碰撞风险等突出优势。与当前柔性航天器不同的是,薄膜航天器没有任何支撑结构,推力器直接配置在柔性结构上,轨道和姿态控制的推力可能引起大幅结构变形,结构变形又反过来影响轨道和姿态控制精度,呈现出独特的轨道-姿态-结构耦合效应,给控制系统的设计带来了巨大挑战。
科研动态 | 中山大学胡玲玲教授团队:混合神经网络预测182万种薄壁结构的冲击压溃响应,为优化的创新设计提供高效的工具
薄壁结构具有优异的能量吸收能力,已被广泛用于冲击防护。其防护性能依赖于截面构型,因此设计各种截面构型以提高薄壁结构防护性能一直是冲击工程领域的研究焦点。传统的设计范式通常依靠经验试错或仿生猜测,导致设计域的探索局限于特定的结构形式。此外,薄壁结构在冲击荷载下发生大变形,涉及局部屈曲、塑性变形、接触碰撞等强非线性问题,对该压溃过程的仿真计算成本很高。因此,亟需一种快速且高通量获得结构动态压溃力学响应的新范式。

6月18日下午,航空航天学院校友理事会会议在中山大学深圳校区逸仙楼举行。学院党委书记罗愈业、院长吴志刚、副院长黄建亮、党委副书记赵晓江及教师代表出席会议,名誉会长杨路、黄庆文,顾问程斌、石方民等校友代表等参加会议。会议由黄建亮副院长主持。
科研动态 | 田立丰副教授团队在国际机械科学杂志IJMS发表论文
研究背景 飞行器机体气动减阻技术已成为节能降耗的重要研究方向,其中,基于流动控制的尾迹管理策略被广泛视为降低压差阻力的有效途径之一。以Ahmed车身为代表的简化模型被大量用于探究车辆尾部复杂分离流动机理。该类模型尾部流动呈现显著的三维分离特征,C柱涡、倾斜面分离剪切层以及基底回流泡等多尺度相干结构共同决定了尾部压力分布与总阻力水平。现有研究表明,斜背角度是影响全局流态的关键参数,其临界值导致高阻与低阻两种迥异的尾流拓扑形态。围绕高阻状态的流动控制,学界已发展出诸如吹/吸气、等离子体激励及襟翼导流等多种主/被动方法,旨在抑制剪切层卷起、削弱C柱涡强度并促进基底压力恢复。然而,尽管上述控制手段在减阻数值上各有成效,不同控制方法所诱导的低阻尾流拓扑是否具有内在相似性、其动力学行为是否存在共同演化规律,至今尚未得到系统揭示。多数既有研究侧重于单一控制策略的工程收益评估,而对跨方法、跨构型之间的流场模态归一化分析及统一物理机制提取关注不足。

科研动态 | 中山大学航空航天学院CFD研究与应用团队在航空航天领域顶刊Aerospace Science and Technology发表最新成果
跨声速飞行条件下,翼型表面的激波会与边界层发生强烈相互作用,诱导分离、再附和尾迹涡结构演化,进而形成自持的大幅激波振荡,即跨声速抖振。抖振会限制飞行包线、诱发结构振动并降低运行效率,是高速飞行器气动设计和安全运行中需要重点解决的非定常流动问题。
科研动态 | 张锦绣教授、刘源教授团队在领域顶刊Aerospace Science and Technology发表论文
研究背景与意义 在轨服务任务,包括在轨加注、空间碎片清除、在轨组装与维修等,已成为当前航天技术发展的重要方向。其中,航天器自主近距离操作是实现上述任务的核心关键技术之一。在复杂轨道环境下,服务航天器需要对目标航天器实施安全、稳定且高精度的近距离逼近与操作。该过程面临多方面技术挑战:一方面,航天器平动与姿态动力学之间存在显著耦合特性,亟需建立统一的六自由度建模与控制框架;另一方面,系统还需同时满足接近走廊、传感器视场角等多种空间运动约束,并应对执行器饱和及外部扰动等实际工程因素的影响。现有控制方法大多采用姿轨解耦设计、渐近稳定控制或单一约束处理策略,难以在预设时间内同时实现相对位姿协同收敛、约束严格满足以及输入受限条件下的闭环稳定性。因此,如何兼顾控制可行性、约束安全性与瞬态性能,仍是航天器自主近距离操作领域亟待解决的重要问题。
党建引领 校企协同|力学教职工党支部与南航科技(广东横琴)有限公司开展党建联学共建活动
2026年5月9日,我院力学教职工党支部赴南航科技(广东横琴)有限公司开展以“深学笃行正确政绩观 党建引领校企共发展”为主题的党建联学共建活动,此次活动旨在通过党建搭台,促进双方在航空领域的业务融合与技术创新。
科研动态 | 中山大学田立丰副教授团队在基于涡流发生器的超声速后向台阶流动的控制研究上取得进展
后向台阶是超声速流动中一种常见且重要的结构,在弹头的光学窗口以及超燃冲压发动机燃烧室的稳焰器上均有存在,研究其流动特征并加以控制十分有价值。而斜坡型涡流发生器则是一种经典可靠的被动控制手段。近日,航空航天学院田立丰团队利用基于纳米示踪的平面激光散射技术,对由不同展宽的斜坡型涡流发生器控制下的Ma = 3 的超声速后台阶流场进行可视化,并结合分形维数分析、间歇性分析及统计手段,揭示涡流发生器展宽变化对流场的影响。相关成果以《Experimental study on shear-induced vortex breakdown of ramp vortex generators with varying spanwise widths at Mach 3》为题发表于流体领域权威期刊《Physics of Fluids》上。中山大学航空航天学院2024级硕士生胡志雄为第一作者,中山大学航空航天学院田立丰副教授为通讯作者,中山大学航空航天学院为第一通讯单位。

科研动态 | 中山大学田立丰副教授团队在光学窗口切向超声速气膜的研究进展
切向超声速气膜作为飞行器光学窗口主要的热防护手段,其流动机理对光学窗口的气动光学效应有着重要的影响。近日,航空航天学院田立丰团队利用纳米示踪的平面激光散射技术,在Ma=3的流场中,研究了在不同喷管压比条件下,三维切向超声速气膜的流动机理。基于SIFT算法计算流场混合层的流向速度分布,并利用分形维数和两点空间互相关的方法研究流场涡结构的演化。相关研究成果以“Experimental study of a three-dimensional supersonic tangential film subjected to different nozzle pressure ratios”为题发表于航空航天领域权威期刊《Aerospace Science and Technology》上。中山大学航空航天学院2024级博士生黄开诱为第一作者,中山大学航空航天学院田立丰副教授为通讯作者,中山大学航空航天学院为第一通讯单位。

第二届爆震与新型推进专业委员会第五次全体会议在中山大深圳校区圆满召开
中国工程热物理学会热机气动热力学分会第二届爆震与新型推进专业委员会第五次全体会议近日在中山大学深圳校区圆满召开。本次会议由中国工程热物理学会热机气动热力学分会爆震与新型推进专业委员会主办,中山大学航空航天学院承办,31所爆震发动机技术研究中心协办。会议旨在加强各委员单位的合作与交流,促进新形势下爆震与新型推进领域的创新与发展。

